李群
直观上的李群
首先李群也是一种降维算法。降维就是为了使用更低维的向量最大程度上表示原来的特征,在机器学习中有很多降维算法:
-
PCA(Principal Component Analysis)算法处理的是方形的矩阵(n*n); -
奇异值分解 SVD (Singular Value Decomposition)可以处理任意形状的矩阵(m*n); -
李群则可以处理
张量,对张量进行降维度。
李群计算流程
李群运动链模型
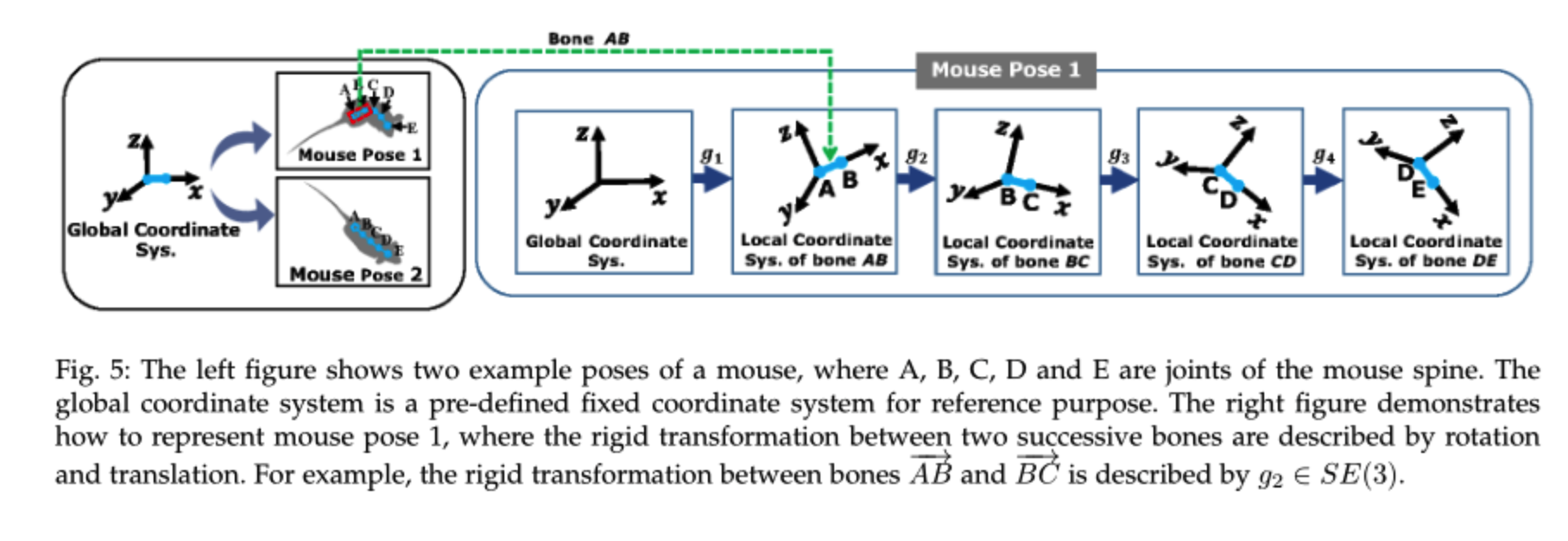
这里以老鼠为例,假设老鼠身上一共有四根骨头,AB,BC,CD,DE,以每根骨头自身作为x轴,单独建立每根骨头的三维坐标系,C的坐标在AB骨头坐标系表示就是:
其中,
-
q是C在BC三维坐标系下的,形状是**
3*1**; -
q^是C在AB坐标系下的坐标,形状是
3*1 -
R是旋转矩阵,形状是
3*3 -
t是平移矩阵,形状是
3*1 -
中间的矩阵就是变换矩阵,整体维度就是
4*1 = 4*4 * 4*1
更一般的坐标变换:
gi就是上图中的g1,g2…
姿态变换:
两种姿态都可以映射到全局的一个三维坐标系上,就可以进行转换。
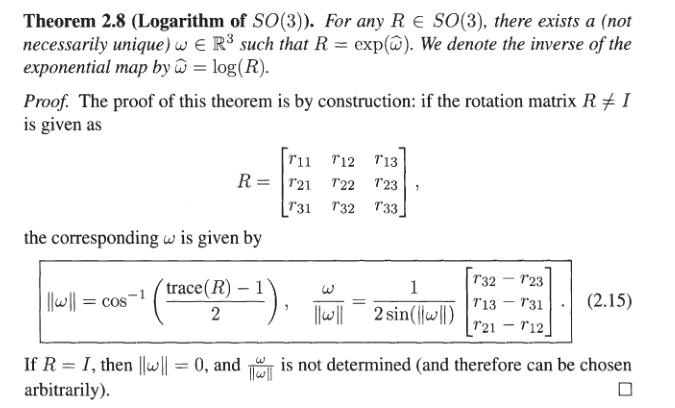
旋转矩阵 R
首先R属于三阶特殊正交阵,(满足6个条件) 而本来的维度是9,所以自由度为3,所以可以用一个向量来代替这个旋转矩阵。
所以下面的工作就变成了R的降维工作。
预备知识1:斜对角矩阵
- 对于任意的μ,总有唯一的μ^与之对应;
- 对于任意的μ^ ,总有唯一的μ与之对应;
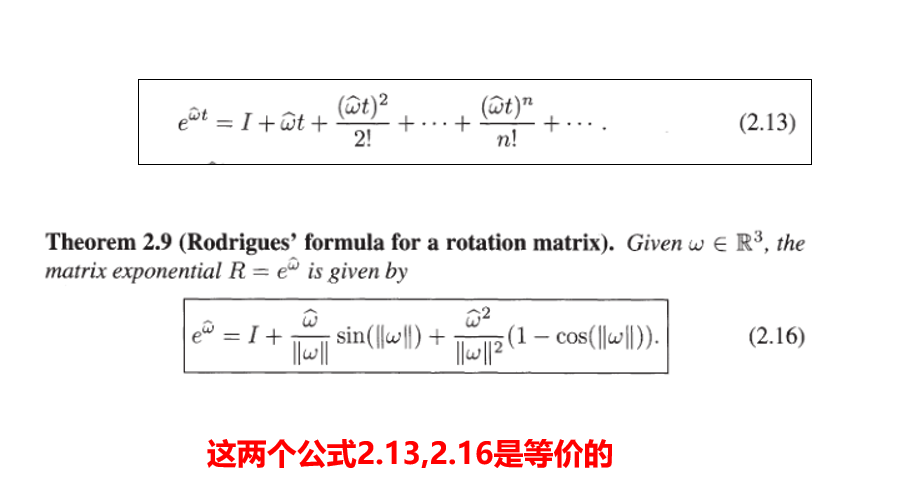
预备知识2 :e^w ^
R的变换
直觉理解

- 首先因为旋转矩阵的自由度为3,所以是在3维流形中;
- 在流形曲面处的一个很小的切平面就是李代数,可以用三维坐标表示处原来在流形中的坐标;
- 整个三维流形就是李群